Parking Gate with a Sensor
Lab 3
Process
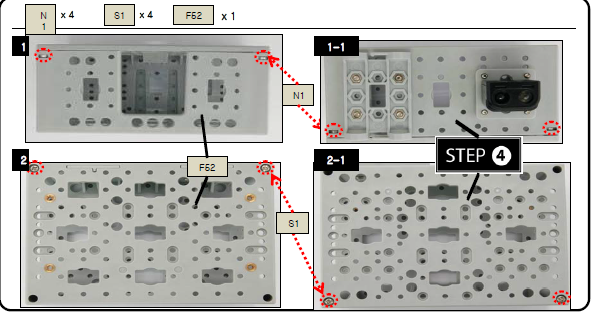
Step 1: Attaching F3 to F6
Take 3* F3 and 1* F6
As shown below attach 3*F3and 1* F6 using 6 * N1 (nuts) and 6 * S1 (screws)

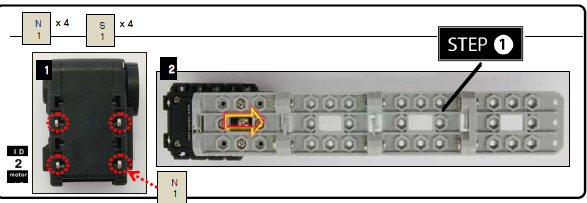
Step 2: Attaching step 1 to ID2.
Take an actuator with ID2 and make sure that horn is properly aligned.

Now attach Step 1 to rotating wheel of the actuator using 4* N1 (Nuts) and 4 * S1 (Screws) as shown in the figure
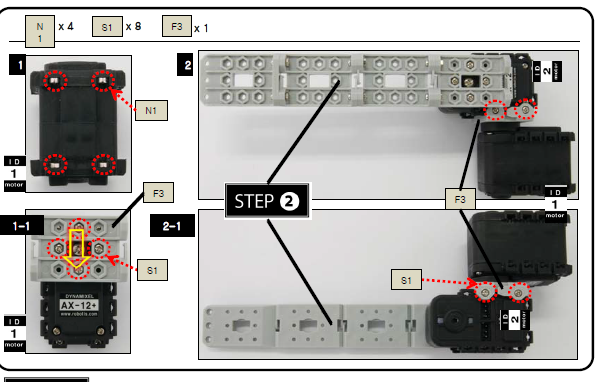
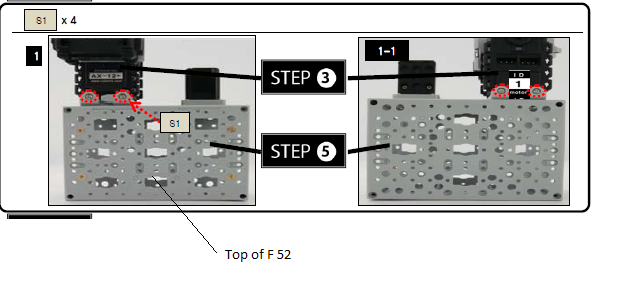
Step 3: Attaching actuator with ID1 to actuator with ID 2
Attach Actuator with ID 1 to actuator with ID2 with the help of F3 as shown in figure.
Use 4 * N1, 8 * S1 and 1 * F3.
Give importance to the direction as shown in the figure.
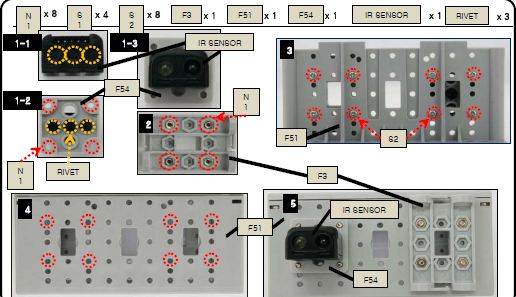
Step 4: Attaching sensor
Attach IR sensor to F 54 using Rivet as shown in the figure
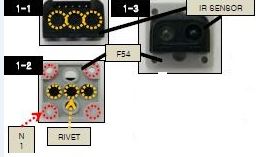
Attach above F54 and F3 to F51 as shown in the figure give importance to the direction.
Step 5: Attach F52
Attach step 4 to F52 as shown in figure using 4*N1 and 4* S1
Step 6: Attach step3 to step 5 using 4 S1’s
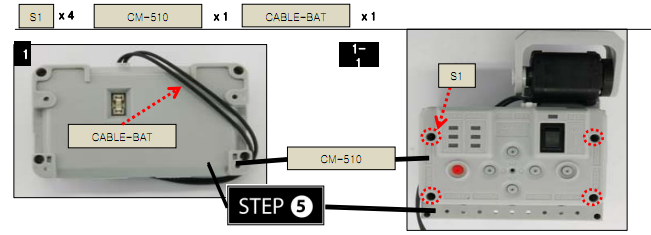
Step 7: Attach CM- 510 on top of F 52
Insert one end of CABLE – BAT wire into BAT port of CM 510 and attach CM 510 to step 4 using 4*S1 on top of F52.
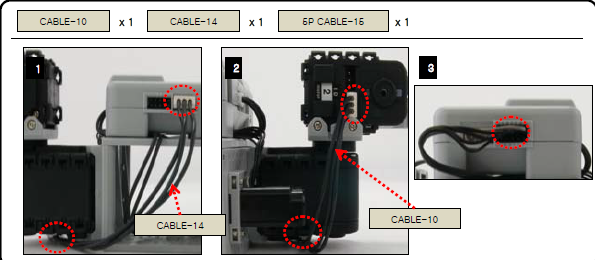
Step 8:
Connect ID1 to CM-510 with CABLE-14.
Connect ID1 to ID2 with CABLE-10.
Connect IR SENSOR to Port 6 of CM-510 with 5P CABLE-15.
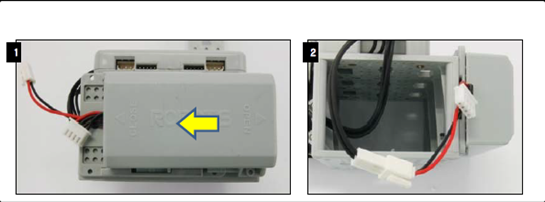
Step 9: Attach battery to step 8
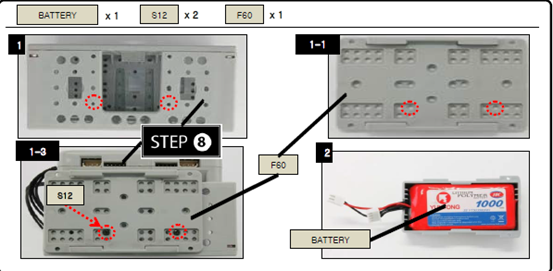
Step 10: Connect battery through battery cable
Finished Product:
