Intoduction to Roboplus Software
Lab 1
Lab 1: Intoduction to Roboplus Software
Roboplus
RoboPlus is software to create a customized program for every ROBOTIS product.
Roboplus can installed at the following link
http://www.robotis.com/xe/download_en/40595
Roboplus includes following two key features
- Roboplus Task
- Roboplus Motion
Roboplus Task:
Roboplus Task is a computer program which consists of instructions to control robot's actions. Assembling a robot is one part, but the most crucial part is writing a program to make a robot work accordingly. For all the labs Roboplus provides a program in .tsk format which can uploaded into CM 510 (Servo Controller) using RoboPlus software.
All the labs in this manual have programs written to perform specific tasks and they can be found at
http://support.robotis.com/en/
Task code will have a file with .tsk extension and can be opened with Roboplus.
Steps:
- Download the .tsk file
- Open the .tsk file using Roboplus software.
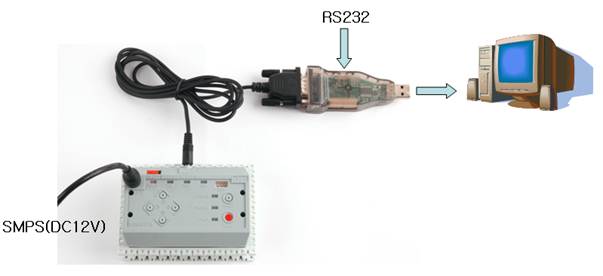
- Connect CM 510 to the computer with the kit provided.(explained later in this manual)
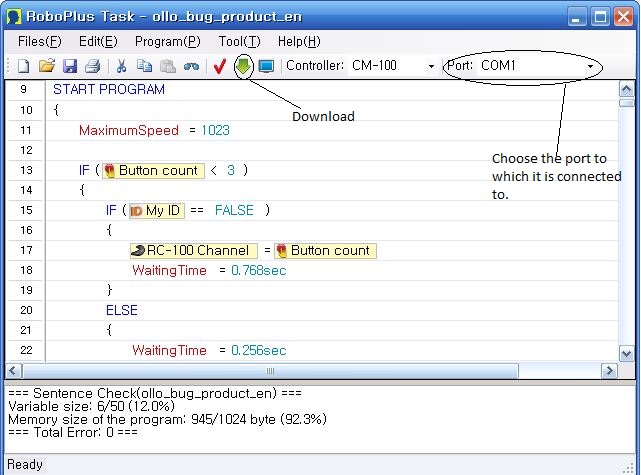
- Choose the correct COM port. (Microsoft dynamically updates its drivers for a particular port)
- Download the program into CM 510 using download icon in the software. (Make sure that CM 510 is not in play mode)
Roboplus Motion:
In order for the robot to move, a motion file needs to be uploaded into CM 510. All the labs after lab 4 use motion files (.mtn) to move. A motion file is uploaded to CM -510 Servo controller similar to that as task file.
Getting ready to download .tsk code to the Robot
- Call the task code(*.tsk) from RoboPlus Task.
- You can open it by double-clicking the task code file.
- You can open it using Open File function of RoboPlus Task.
- You can open it by dragging & dropping on RoboPlus Task.
- Connect the PC and the Controller with USB2Dynamixel.
- Turn on the power of the controller. (Please refer to controller information on how to turn on the power)
Downloading Task Code
- Connect the controller before downloading the task code.
To download the task code, the controller must be connected to the PC. (Please refer to controller information for information on how to connect the controller to the PC.)
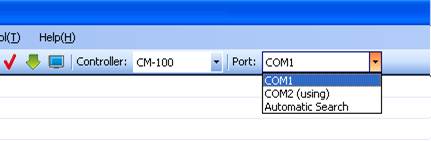
- Select the correct COM port (if you know) or else use the "Automatic Search" function to easily find out the appropriate port.
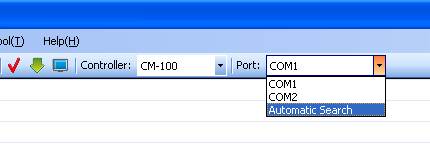
If the chosen communication port is being used by another program, you must first find and stop the program.
If RoboPlus Task is unable to find a controller, the following error message will be shown.
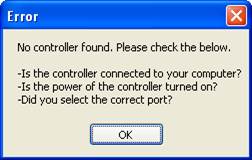
- Check if the controller is connected to the PC. (See controller information on how to connect the controller.)
- Check if the controller is turned on.
- Check if the correct communication port was chosen.
- Select the download menu

If the program has an error, you must find the error and correct it. (See "rule check error messages")
- Download the program
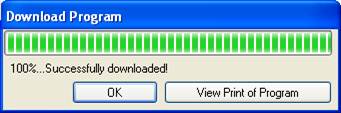
If the downloading fails, it will automatically try again from the beginning.
- Execute the task code and your robot will move
Turn on the controller and execute the downloaded task code. (Please refer to each controller information to learn how to execute the task code.)